Menschen - vor allem in der Fertigung - binden häufig einen Knoten, ziehen das Gehäuse von einem Kabel ab, stecken einen Stift in ein Loch oder verwenden ein Handwerkzeug wie eine Bohrmaschine. Sie mögen wie einfache Aufgaben erscheinen, sind aber sehr komplex und beinhalten extrem feine Finger- und Handbewegungen.
Verwandte Inhalte
- Wie Roboter das Labor verließen und den Menschen halfen
Obwohl Roboter immer mehr in die Fabrikarbeit und in eine Vielzahl anderer Tätigkeiten involviert sind - einschließlich in der Dienstleistungsbranche und im Gesundheitswesen -, ist ihre Geschicklichkeit bei weitem nicht so beeindruckend. Seit sie vor mehr als 50 Jahren zum ersten Mal in Automobilfabriken eingesetzt wurden, haben wir Roboter gebaut, mit denen sich Teile gut schweißen, lackieren und zusammenbauen lassen. Die besten Roboterhände von heute können vertraute Objekte aufnehmen und an andere Orte bringen - beispielsweise Produkte aus Lagerbehältern entnehmen und in Kartons legen.
Aber Roboter können ein Handwerkzeug nicht richtig ausrichten - zum Beispiel einen Kreuzschlitzschraubendreher mit den Kerben einer Schraube ausrichten oder einen Hammer auf einen Nagel richten. Und sie können definitiv nicht zwei Hände gleichzeitig benutzen, wie zum Beispiel die Batterien in einer Fernbedienung zu ersetzen.
Menschliche Hände eignen sich hervorragend für diese Aufgaben und vieles mehr. Roboterhände müssen agiler, zuverlässiger und stärker sein und sich noch feiner als bisher bewegen können, um herauszufinden, wozu sie in der Lage sind. Halten und wie man es am besten fasst. Damit Roboter mit Menschen zusammenarbeiten können, müssen wir uns überlegen, wie wir Roboter herstellen können, die uns buchstäblich helfen, wenn unsere eigenen zwei nicht ausreichen.
Meine Forschungsgruppe an der Northeastern University arbeitet genau daran, insbesondere für humanoide Roboter wie NASAs Valkyrie, die drei Finger und einen Daumen an jeder Hand haben. Jede Ziffer hat knöchelartige Gelenke und jede Hand hat ein Handgelenk, das sich leicht drehen lässt. Wir arbeiten an der Schaffung von Bewegungen - Kombinationen aus Arm-, Handgelenk-, Finger- und Daumenbewegungen, die gemeinsam eine Aufgabe erfüllen, wie das Bewegen eines Schlüssels in einem Kreis, um einen Bolzen festzuziehen, oder das Ziehen eines Wagens von einem Ort zu einem anderen.
 Jeder dieser Industrieroboter verfügt über mehrere Spezialwerkzeuge. Könnten viele ihrer Aufgaben von Roboterhand erledigt werden? (Steve Jurvetson / flickr, CC BY)
Jeder dieser Industrieroboter verfügt über mehrere Spezialwerkzeuge. Könnten viele ihrer Aufgaben von Roboterhand erledigt werden? (Steve Jurvetson / flickr, CC BY) Die Wichtigkeit von Händen
Anstatt jeden Roboter zu einer maßgeschneiderten Maschine für eine ganz bestimmte Aufgabe zu machen, müssen wir Mehrzweckroboter oder sogar solche Maschinen entwickeln, die als „Allzweckmaschinen“ bezeichnet werden können - für fast jede Aufgabe geeignet. Ein Schlüssel zum Erfolg dieser Robotertypen sind exzellente Hände.
Unsere Arbeit konzentriert sich auf die Entwicklung einer neuen Klasse anpassungsfähiger Roboterhände, die präzise Feinbewegungen und autonomes Greifen ermöglichen. Wenn Roboter Nägel einschlagen, Batterien wechseln und ähnliche Bewegungen ausführen können - grundlegend für Menschen, aber sehr komplex für Roboter - sind wir auf dem besten Weg zu menschlicher Fingerfertigkeit in Roboterhänden.
Um dieses Ziel zu erreichen, müssen auch neue Designs entwickelt werden, die harte und weiche Elemente enthalten - die Art und Weise, wie menschlicher Knochen einem Griff Festigkeit verleiht, wobei die Haut den Druck ausbreitet, damit ein Weinglas nicht zersplittert.
Schneller entwickeln und testen
Moderne technologische Verbesserungen erleichtern den Entwicklungsprozess. Mit dem 3D-Druck können wir sehr schnell Prototypen herstellen. Wir können sogar kostengünstige Einwegkomponenten herstellen, um verschiedene Mechanismenanordnungen auszuprobieren, z. B. Zwei- oder Dreifinger-Greifer für einfache Pick-and-Place-Aufgaben oder anthropomorphe Roboterhände für schwierigere Operationen.
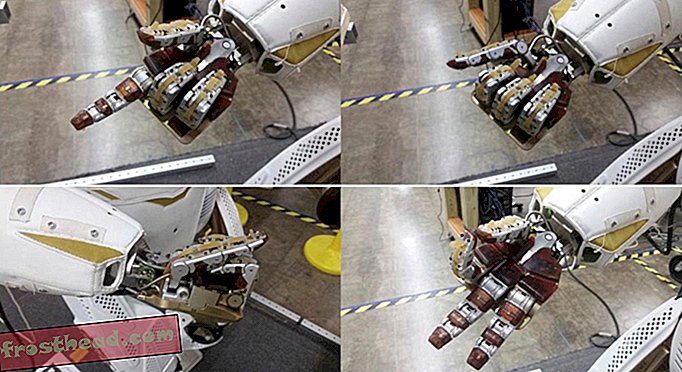 Verschiedene Arten von Händen auf einem NASA Valkyrie-Roboter. (Northeastern University, CC BY-ND)
Verschiedene Arten von Händen auf einem NASA Valkyrie-Roboter. (Northeastern University, CC BY-ND) Da elektronische Kameras und Sensoren immer kleiner werden, können wir sie auf neue Weise integrieren. Wenn wir zum Beispiel Drucksensoren und Kameras in eine Roboterhand legen, können sie der Robotersteuerung (ob menschlich oder automatisiert) Rückmeldung geben, wenn ein Griff sicher ist oder wenn etwas zu rutschen beginnt. Eines Tages können sie möglicherweise erkennen, in welche Richtung sich das rutschende Objekt bewegt, damit der Roboter es erfassen kann.
Diese Fähigkeiten sind für den Menschen durch Sehen und Propriozeption bereits selbstverständlich (die Fähigkeit, die relativen Positionen von Körperteilen zu erfassen, ohne darüber nachzudenken oder nachzudenken). Sobald wir sie mit Robotern erreichen können, können sie beispielsweise erkennen, ob ein Griff zu stark ist und ein Objekt zu fest zusammendrückt.
Planung koordinierter Bewegungen
Ein weiterer Meilenstein wird in der Entwicklung von Methoden für Roboter liegen, mit denen sie herausfinden können, welche Bewegungen sie in Echtzeit ausführen müssen, einschließlich der Erfassung, was zu jedem Zeitpunkt in ihren Händen vor sich geht. Wenn eine Roboterhand Änderungen an Objekten erkennt, die sie handhabt, oder Gegenstände in der Hand manipuliert, können sie bei den üblichen manuellen Aufgaben wie Knotenbinden und Abisolieren helfen.
Die Zusammenarbeit mit zwei Händen liegt noch weiter in der Zukunft, obwohl dies insbesondere für die Fertigung einen erheblichen Schub bedeuten würde. Ein Roboter, der einen Bohrer mit zwei Händen bedienen oder Maschinenteile von einer Hand zur anderen übergeben kann, wäre eine große Verbesserung, da die Fabriken noch mehr Schritte in ihren Prozessen automatisieren können.
 Ist das der Roboter der Zukunft? (NASA)
Ist das der Roboter der Zukunft? (NASA) Wir Menschen haben diese Systeme noch nicht entwickelt. Das Erreichen einer menschenähnlichen, autonomen Roboter-Geschicklichkeit wird in absehbarer Zeit die Roboterforscher, -technologen und -innovatoren beschäftigen. Dies wird die fortschreitende Robotik-Revolution in der Fertigung nicht bremsen, da die aktuellen Prozesse immer noch viel Raum für Automatisierung bieten, um Sicherheit, Geschwindigkeit und Qualität zu verbessern. Aber wenn wir Roboter noch besser machen, können sie uns helfen.
Dieser Artikel wurde ursprünglich auf The Conversation veröffentlicht.
Taskin Padir, außerordentlicher Professor für Elektrotechnik und Informationstechnik an der Northeastern University